

エンコーダは、機械的な位置の変化を、位置値としては回転位置または直線位置をセンサで測定して、電気信号として位置情報を出力する装置です。 軸の回転位置(角度)を検出するタイプをロータリー(回転)エンコーダ、直線の位置(変位)を検出するタイプをリニアエンコーダ(リニアスケール)と言います。 位置(変位)、動作方向及び速度の情報を出力します。
直線と回転の位置を測定するための目盛として、直線スケールと円板(ディスク)及びリングがあり、その目盛を各種センサで測定します。
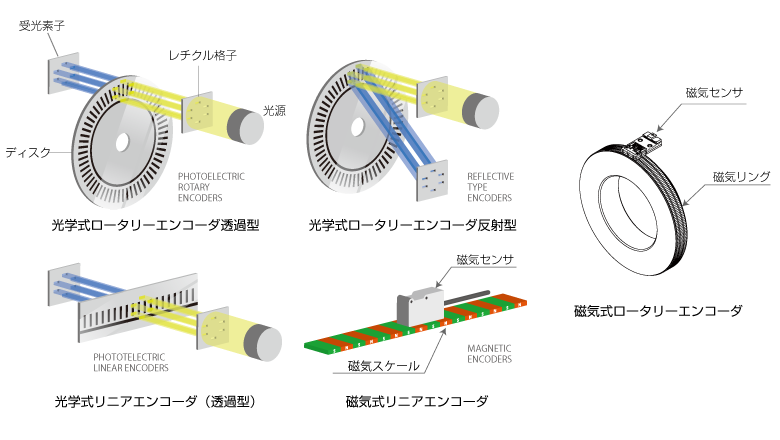
エンコーダの位置検出方式(目盛とセンサ)にはエンコーダディスク(スケール)を光で検出する光学式と磁気スケール(リング)を磁気式で検出する方法、さらに鋼球をパイプ内に封入したスケールを一次/二次コイルで検出する電磁誘導式があります。
光学式のスケール(円板)はガラスに目盛を付けたもの、スチール板に目盛を付けたもの、スリット穴を開けたもの等があります。 それをLED、レザー等の光源とフォトダイオード等の受光素子を組合せて測定します。
磁気スケールは磁性ゴムに、磁気リングはフェライト焼結リングにNSの磁極で目盛を付けたものをMRセンサ、ホール素子等のセンサで測定します。
エンコーダには移動量に応じた数のパルスを出力するインクリメンタル型と検出個所の絶対位置をデータ出力するアブソリュート型があります。
アブソリュート方式のスケール及びディスク(円板)には絶対位置の専用目盛が刻んであります。この目盛をセンサで読んでアブソリュート信号を出力します。
- エンコーダの測定方式例
- アブソリュートエンコーダのコード例
-
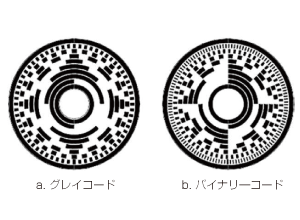
アブソリュート回転エンコーダの
パターン例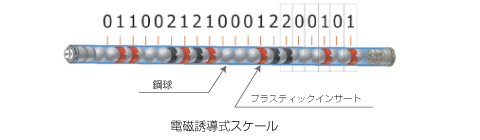
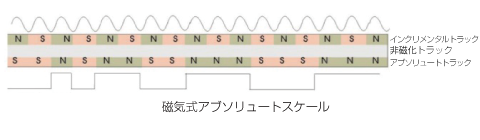
アブソリュートリニアエンコーダのパターン例